|
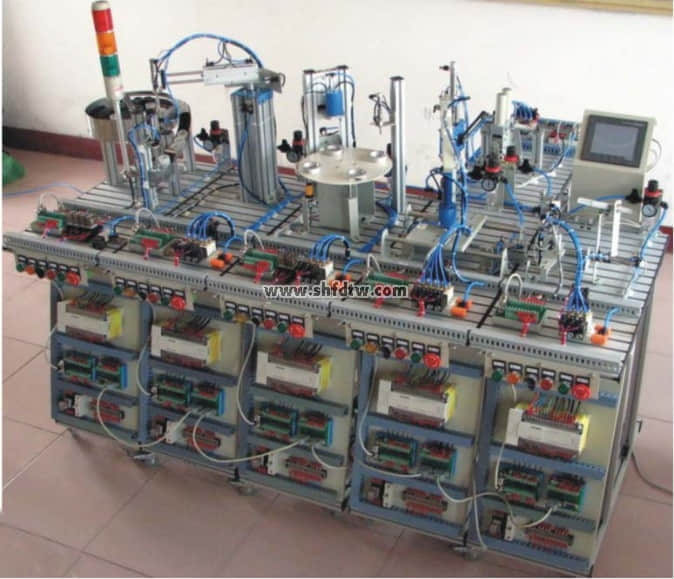
1.系統(tǒng)設備功能要求:
充電寶自動組裝��。
2.工業(yè)機器人主要技術參數(shù)要求:
2.1 機器人本體(數(shù)量1臺):
1)動作類型:多關節(jié)型��;
2)★控制軸數(shù):6軸(需提供機器人生產(chǎn)廠家的說明書及彩頁加蓋機器人生產(chǎn)廠家鮮章作為證明材料)�����;
3)放置方式:落地式
4)最大工作半徑=1722mm���;
5)手部最大有效負載(第6軸)≤20KG�;(需提供機器人生產(chǎn)廠家的說明書及彩頁加蓋機器人生產(chǎn)廠家鮮章作為證明材料)���;
6)重復定位精度:±0.08mm���;
7)本體重量:220kg;
8)運儲環(huán)境溫度要求:-25℃~+55℃��;
9)環(huán)境濕度要求:≤95%RH�;
10)★防塵防水標準:IP65及以上;
11)多處理器系統(tǒng)����,額定功率≥6KVA(變壓器容量)�����,具有可編程單元���,且具備便攜式示教盒,具備操縱桿和鍵盤�,彩色觸摸式顯示且具中、英文菜單選項��;
12)輻射:EMC/EMI屏蔽���;
13)機器人具有防碰撞功能����。
14)★機器人本體安裝寬度在280毫米以內(nèi)
2.2機器人控制系統(tǒng)(1個)要求:
1)控制硬件要求:
(1)多處理器系統(tǒng)
(2)內(nèi)部PCI 總線控制方式
(3)大容量閃存(標配32M��,最大64M)
(4)機器人操作系統(tǒng)�,含搬運�����、裝配����;
(5)電源輸入:3×380V���,50/60Hz;
(6)環(huán)境溫度:5℃- 45℃�����;
(7)機器人連接電纜:≥5m�����;
(8)輸出方式:機器人I/O輸入點≥16點���,輸出點≥16點�����;
(9)通訊:支持總線通訊�;通訊線長度≥7m���。提供TCP/IP通訊接口�;
2.3工業(yè)機器人示教盒要求:
1)彩色觸摸式顯示����,具備中英文菜單選項���;
2)編程單元:便攜式示教盒,具備操縱桿和鍵盤��;
3)連接電纜:≥10m�。
2.4機器人廠家說明書。
3.機器人手爪夾具(1套):
1)電池形狀��,手爪采用氣動夾爪�,進口優(yōu)質(zhì)夾爪氣缸MHZ20D-M9BL,對插型傳感器 ,手爪的開合行程為:10����,可另外自行加工替代手爪抓頭從而滿足不同產(chǎn)品大小的相應夾合范圍,用于實習教學��;
2)配備位置檢測傳感器�����,用于檢測工件是否夾持到位�����;
3)在斷電����、斷氣的情況下,工件不會脫落;
4)配1拖3自動換手裝置�,電、氣自動快速切換���,進口優(yōu)質(zhì)產(chǎn)品�����;
5)配套手爪:夾取電池��,夾取電池盒�,夾取電池盒蓋等3套,夾爪加工件高強度航空鋁制作���、本色陽極處理����;
4.開放式電氣控制平臺1套
1)開放式電氣控制平臺包括PLC�����,線槽,接線板���,開關電源�,端子臺�����,繼電器����,等等,主要用于控制成套自動化生產(chǎn)線:
2)PLC 1臺
采用PLC同時預留20%的點位���,根據(jù)現(xiàn)場的結(jié)構相應增加點位模塊�����;(帶顯示屏的 CPU���;工作存儲器可存儲 1 MB 代碼和 5 MB 數(shù)據(jù);位指令執(zhí)行時間 10 ns����;4 級保護,集成的工藝功能:運動控制�����,閉環(huán)控制��,計數(shù)與測量����;集成的跟蹤功能;第 1 個接口:PROFINET IO 控制器�,支持 RT/IRT,2 個端口�,支持 MRP,傳輸協(xié)議 TCP/IP�����,S7 通信����,Web 服務器,恒定總線循環(huán)時間��,路由功能;第 2 個接口:★PROFINET 基本服務����,傳輸協(xié)議 TCP/IP,Web 服務器���,路由功能����;第 3 個接口:★PROFIBUS DP 主站�����,恒定總線循環(huán)時間��,路由功能���;固件版本 V1.8)
3)開關電源���;24V/10A
5.機器人底座
碳鋼焊接結(jié)構,表面烤黑漆處理�,高度達到現(xiàn)場使用需求,鋼板厚度:20mm����。
6. 機器視覺系統(tǒng)1套:
1)能準確識別托盤位置�����,并將位置參數(shù)信息準確、實時提供給控制系統(tǒng)�;
2)★工業(yè)相機1個,分辨率 > 2048×1536���;
3)★工業(yè)500萬像素級低畸變鏡頭(焦距參數(shù)范圍8mm/12mm/16mm/25mm/35mm)1個�;
4)機器視覺專用LED高清頻閃光源2套(單獨兩套)�。
5)★采用逐行CMOS芯片以及行曝光方式數(shù)字高清工業(yè)相機,相機與工控機通過千兆網(wǎng)接口方式通訊�。
6)高穩(wěn)定性工控機(一臺):
CPU:Inteli5及以上;硬盤:1T及以上���;內(nèi)存:4G及以上����;顯卡:GTX750�����;2個1000Mbps RJ45網(wǎng)口;最少2個PCI-E插槽�����;非運行狀態(tài)下:溫度-40°C到70°C�����,濕度10―95% ����、 60°C不凝結(jié);頻率:運行狀態(tài):溫度0°C到40°C���,濕度10―85% ����、40°C不凝結(jié)�,頻率(5—500HZ)1Grms,震動:10G(11ms持續(xù)�,半正玄波);顯示器21英寸及以上��。
注:組裝站與包裝站的機器視覺系統(tǒng)共用1臺工控機�����。
7)PCI—Express接口千兆網(wǎng)圖像采集卡1張。
注:組裝站與包裝站的機器視覺系統(tǒng)共用1張兩通道千兆網(wǎng)采集卡��。
8)★視覺庫:國際一線行業(yè)代表性視覺庫��。
7.輸送皮帶線1臺:(長:1000 寬:400 高:750):
1)輸送皮帶線長1000mm���,工業(yè)3.0PVC專業(yè)輸送皮帶,皮帶寬度400mm左右;
2) 機身板材質(zhì)SPCC 2.5折彎焊接噴塑處理��;
3)機架材質(zhì)40×40×2.0方管焊接噴塑處理����;
4)皮帶托板2.0鍍鋅板折彎;
5)皮帶速度18-25,m/min����,變頻調(diào)速,滿足不同生產(chǎn)速度的需要��;
6)馬達200W ����,馬達轉(zhuǎn)速1400r/min�����,根據(jù)減速機相應的減速10-30��,電壓單項220V,變頻調(diào)速范圍90-1400r/min�;
7)變頻器��,國際主流產(chǎn)品(供電單相AC220V�,50HZ) 。
8.充電寶組裝臺(1套):
1)機架 數(shù)量1臺:40mm×40mm×2.0mm方管焊接��,烤漆處理�;
(2)工作臺面1臺,材料為45#鋼��,尺寸:長650mm���,寬400mm�,厚度15mm��,上下表面銑���、磨后鍍鉻處理�;
3)電池盒仿形定位;
4)自動檢測電池正負極功能(二極管原理���,正向有電流�,反向沒有電流)
5) 精確定位設計���,拆卸后����,重新組裝能夠保證精度�����,以滿足裝配鉗工實習需要����。
9. 提供的學生實訓課程
1)使學生了解學習機器人在工廠組裝段的應用�����。
2) 使學生了解學習工業(yè)自動化的應用��。
3)使學生了解學習機器視覺技術的應用�,如燈光及相機的角度調(diào)節(jié)��。
4)拆裝充電寶組裝臺(注:充電寶組裝臺����、充電寶包裝臺工件連接處做有定位銷或卡槽定位�����,可以供學生拆卸�,拆卸后再次組裝,精度依然存在���,原因卡槽和定位銷可以保證工件組裝后的精度)
5)拆裝及裝配機器人手爪�。
|
消息")